If you work in oceanography, hydrology, offshore engineering, or underwater navigation, you have almost certainly encountered the term “ADCP sensor.” But what exactly is an ADCP sensor, how does it work, what types of ADCP sensors exist, and — most importantly — how do you select the right one for your specific application?
This guide answers every question, from basic principles to advanced selection criteria. Whether you are evaluating your first acoustic Doppler current profiler sensor or comparing specifications across manufacturers, you will find everything you need here.
Table of Contents
- 1. What Is an ADCP Sensor? — Definition & Core Function
- 2. How Does an ADCP Sensor Work?
- 3. Key Components Inside an ADCP Sensor
- 4. Types of ADCP Sensors: A Complete Classification
- 5. Critical ADCP Sensor Parameters Explained
- 6. How to Select the Right ADCP Sensor
- 7. ADCP Sensor Applications Across Industries
- 8. Frequently Asked Questions About ADCP Sensors
- 9. Summary: Choosing Your ADCP Sensor
1. What Is an ADCP Sensor? — Definition & Core Function
An ADCP sensor (Acoustic Doppler Current Profiler sensor) is a hydroacoustic instrument that measures water velocity — speed and direction — across the entire water column by transmitting high-frequency sound pulses and analyzing the frequency shift of echoes reflected from particles suspended in the water.
In plain language: an ADCP sensor sends sound into the water, listens to the echo bouncing back from tiny particles (plankton, sediment, bubbles), and calculates how fast the water is moving at every depth — from the surface all the way down to the seabed. A single ADCP sensor can simultaneously measure velocity at tens or even hundreds of depth layers, producing a full “current profile” — something no single-point current meter can do.
Why “Sensor” — Not Just “Instrument”?
The word “sensor” is important. An ADCP is not just a data logger — it is a precision sensing device integrating multiple transducers, temperature and pressure sensors, an attitude and heading reference system (AHRS), and digital signal processors into a single compact unit. Modern ADCP sensors are increasingly deployed as components within larger systems: mounted on AUVs, integrated into buoy networks, or embedded in permanent monitoring stations. Understanding the sensor-level architecture helps you evaluate performance, integration compatibility, and total cost of ownership.
2. How Does an ADCP Sensor Work?
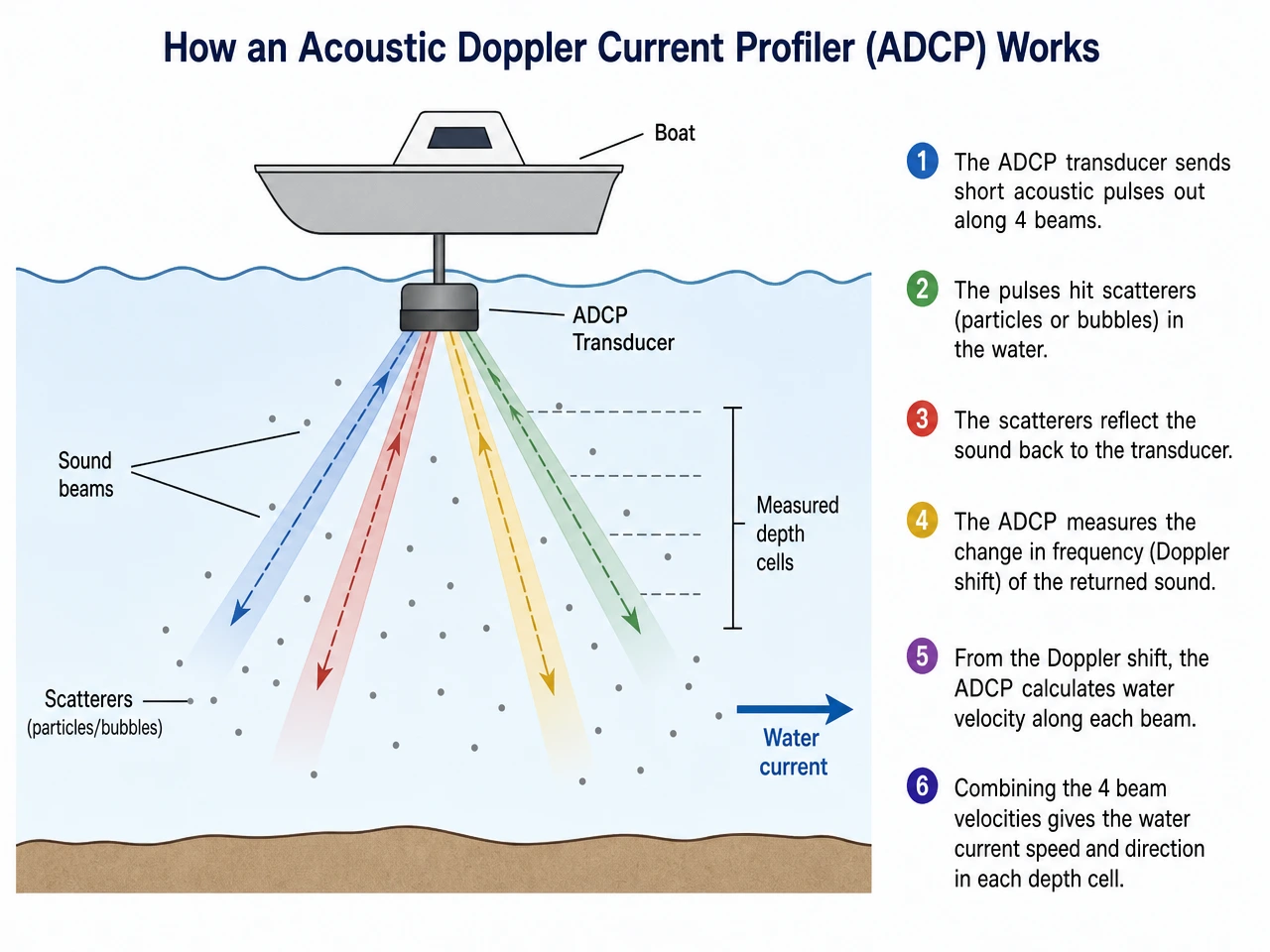
Every ADCP sensor relies on the Doppler effect — the same physical principle that makes a passing ambulance siren change pitch. When sound waves reflect off a moving object, the frequency of the returning echo shifts in proportion to the object’s velocity. In an ADCP sensor, the “moving objects” are particles naturally carried by the water.
The Measurement Process, Step by Step
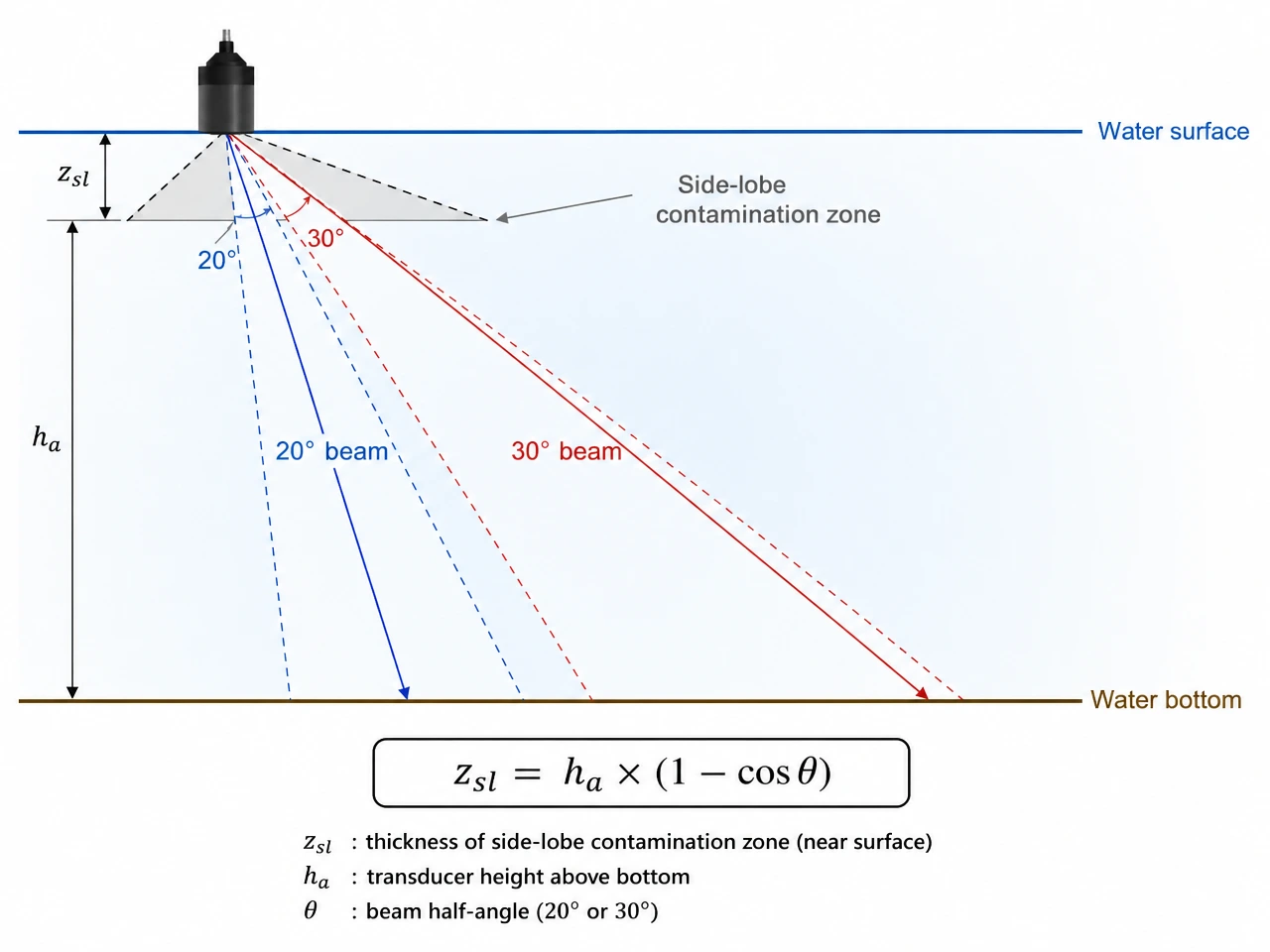
- Transmission. The ADCP sensor emits a short, high-frequency acoustic pulse (a “ping”) through each transducer. Most ADCP sensors use 4 beams arranged in a Janus configuration — angled 20°–30° from vertical and spaced 90° apart horizontally.
- Backscatter. The acoustic energy scatters off suspended particles — plankton, sediment grains, air bubbles — that drift with the water current. A fraction of this scattered energy travels back toward the transducer.
- Reception & Range-Gating. The ADCP sensor listens for returning echoes and divides the return signal into time slices (“range gates” or “depth bins”). Each time slice corresponds to a known distance from the transducer, because the speed of sound in water is known.
- Frequency Shift Measurement. For each depth bin, the ADCP sensor’s digital signal processor measures the frequency difference between the transmitted pulse and the received echo. This frequency shift is directly proportional to the water velocity along that beam.
- Coordinate Transformation. The four beam-direction velocities are mathematically combined into three-dimensional Earth coordinates (East-North-Up) using real-time heading, pitch, and roll data from the built-in AHRS.
- Ensemble Averaging. Multiple pings are averaged into an “ensemble” to suppress random noise, producing reliable velocity estimates across the entire water column.
ADCP Sensor vs. Single-Point Current Meter
This is a common source of confusion. Here is the key difference:
| Feature | ADCP Sensor | Single-Point Current Meter |
|---|---|---|
| Measurement coverage | Full water column profile | One depth only |
| Simultaneous depth layers | Up to 200+ | 1 |
| Bottom tracking | Yes (vessel-mounted) | No |
| Typical cost | Higher | Lower |
| Best for | Profiling, survey, navigation | Point monitoring, budget deployments |
For a deeper comparison, see our article on ADCP vs Traditional Current Meter: Which Is Better?
To understand the working principle in greater technical depth, read our Acoustic Doppler Current Profiler Working Principle guide.
3. Key Components Inside an ADCP Sensor
When you buy an ADCP sensor, you are buying a highly integrated multi-sensor system. Understanding what is inside helps you evaluate build quality, maintenance requirements, and long-term reliability.
3.1 Ultrasonic Transducers (The “Ears and Mouth”)
The transducers are the most critical component of any ADCP sensor. They convert electrical signals into acoustic pulses (transmission) and convert returning acoustic echoes back into electrical signals (reception). Key attributes:
- Piston-type transducers — Traditional design, one ceramic element per beam. Proven, robust, widely used by Teledyne RDI and Nortek.
- Phased-array transducers — Flat multi-element array that electronically steers beams. Smaller form factor, fewer moving parts, and mechanically simpler. Used in Oceantek’s PA-series ADCP sensors.
Read more about phased-array technology in our article on the Oceantek DVL-600-DR-PA5 phased-array breakthrough.
3.2 Attitude and Heading Reference System (AHRS)
Because ADCP sensors are rarely perfectly level when deployed (they tilt with the vessel, mooring, or platform), every reading must be corrected for the instrument’s instantaneous orientation. The AHRS integrates:
- Magnetometers — Compass heading (magnetic north reference)
- Accelerometers — Pitch and roll angles (tilt correction)
- Optionally, gyroscopes for dynamic motion compensation on moving platforms
3.3 Pressure Sensor
An integrated pressure sensor measures the ADCP sensor’s depth, which is essential for: (a) mapping velocity profiles to absolute depth, (b) monitoring mooring depth, and (c) detecting instrument settling or movement. Typical accuracy ranges from ±0.1% to ±0.5% of full scale.
3.4 Temperature Sensor
Sound speed in water varies with temperature (and salinity). A built-in thermistor measures water temperature at the instrument to correct sound-speed calculations in real time. Without accurate sound speed, all velocity and range-gating calculations are compromised.
3.5 Digital Signal Processor (DSP) and Data Logger
Modern ADCP sensors include an onboard DSP for real-time signal processing (pulse compression, Doppler shift extraction, ensemble averaging) and non-volatile flash memory for autonomous data logging. Self-contained ADCP sensors can record months of data without any surface connection.
4. Types of ADCP Sensors: A Complete Classification
Not all ADCP sensors are the same. Selecting the wrong type for your application is the most common — and most expensive — mistake buyers make. Here is how ADCP sensors are classified.
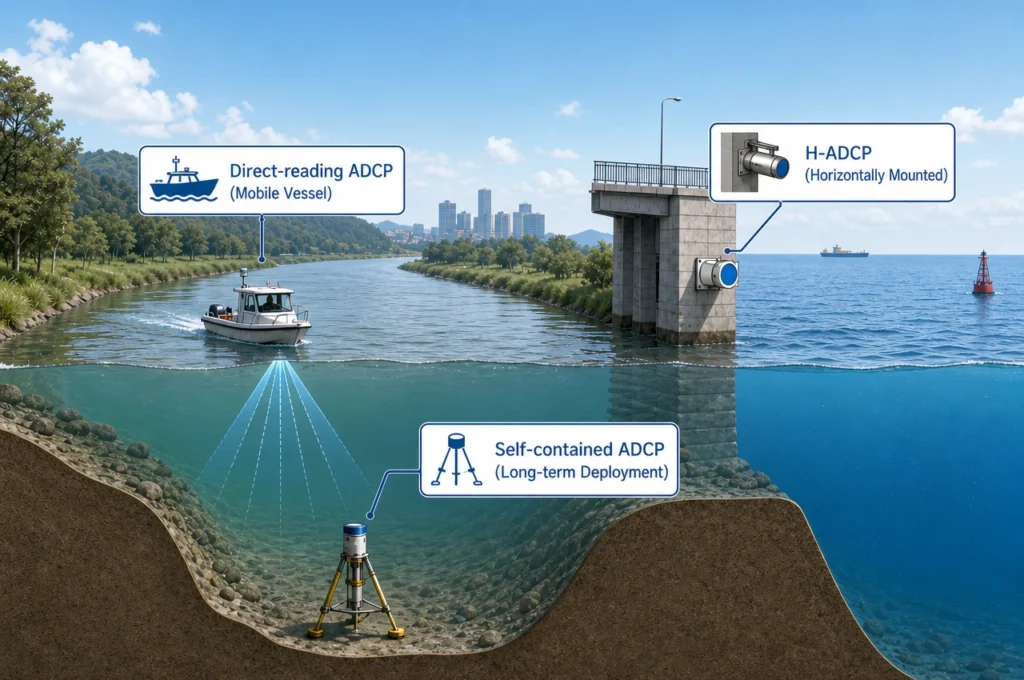
4.1 Classification by Deployment Mode
Direct-Reading (Real-Time) ADCP Sensors
Best for: Vessel-mounted surveys, real-time monitoring stations, applications requiring live data.
- Connected to a surface computer via cable or telemetry
- Data streamed and visualized in real time
- No onboard battery or memory required
- Explore Oceantek Direct-Reading ADCP sensors →
Self-Contained (Autonomous) ADCP Sensors
Best for: Long-term moored deployments, remote locations, subsea observatories.
- Internal battery pack and data logger
- Deploy and recover weeks or months later
- No surface connection required
- Explore Oceantek Self-Contained ADCP sensors →
River-Type (H-ADCP) Sensors
Best for: River discharge measurement, flood monitoring, irrigation canal management.
- Horizontally mounted on riverbanks, bridge piers, or seawalls
- Measure horizontal velocity profiles across the channel
- Often combined with water-level sensors for discharge calculation
- Explore Oceantek River-Type ADCP sensors →
4.2 Classification by Operating Frequency
The operating frequency is the single most important specification because it determines the ADCP sensor’s profiling range and resolution. Here is the fundamental trade-off:
| Frequency | Typical Range | Resolution | Best For |
|---|---|---|---|
| 75 kHz | Up to 600–700 m | Coarse (8–16 m bins) | Deep ocean, open-sea moorings |
| 300 kHz | Up to 120–160 m | Medium (2–4 m bins) | Coastal, shelf, offshore engineering |
| 600 kHz | Up to 50–75 m | Fine (0.5–2 m bins) | Rivers, estuaries, shallow coastal |
| 1200 kHz+ | Up to 15–25 m | Very fine (0.1–0.5 m bins) | Lab flumes, very shallow streams |
For a detailed walk-through of frequency selection, see our Complete Tutorial on ADCP Frequency Selection and our comparison of 600kHz vs 300kHz ADCPs.
4.3 Classification by Transducer Architecture
| Architecture | Pros | Cons |
|---|---|---|
| Piston (FA) | Proven, widely compatible, easy to service | Larger, heavier, more mechanical parts |
| Phased Array (PA) | Compact, lightweight, no moving parts, electronically steered beams | Newer technology, fewer third-party service options |
5. Critical ADCP Sensor Parameters Explained
When evaluating ADCP specifications, focus on these parameters. They directly affect whether the sensor can meet your measurement objectives.
5.1 Velocity Accuracy
Typically specified as ±0.5% of measured value ±5 mm/s for high-quality ADCP sensors. Lower-quality sensors may specify ±1% or worse. For applications requiring absolute accuracy (discharge measurement, engineering surveys), this is non-negotiable.
5.2 Profiling Range
The maximum distance from the transducer head to the farthest depth cell with valid data. Determined primarily by frequency and transmit power. A 300 kHz ADCP sensor typically profiles to 120–160 m under good conditions; a 75 kHz sensor can reach 600+ m.
5.3 Range Resolution (Bin Size)
The vertical thickness of each measurement cell. Smaller bins give finer vertical detail but reduce the maximum range (more bins = more data to process within one ensemble). Typical bin sizes range from 0.25 m (1200 kHz) to 16 m (38 kHz).
5.4 Bottom Tracking
The ADCP sensor’s ability to measure its own velocity relative to the seabed. This is essential for vessel-mounted surveys (to produce absolute water velocities) and for DVL navigation. A good ADCP sensor should have a bottom-tracking range that exceeds its water-profiling range.
5.5 Number of Beams
- 3-beam: Sufficient for velocity measurement, but no redundancy if one beam fails.
- 4-beam (standard): One redundant beam for error estimation and quality control.
- 5-beam: One vertical beam for direct surface/ice measurement, plus 4 Janus beams for velocity.
5.6 Depth Rating
The maximum water depth at which the ADCP sensor housing remains watertight. Typical ratings: 200 m (coastal), 1000–3000 m (deep ocean), 6000 m (full ocean depth). Always select a depth rating with at least 20% margin above your planned maximum deployment depth.
For a complete checklist of selection parameters, see: Which Key Parameters Need to Be Considered When Selecting an ADCP?
6. How to Select the Right ADCP Sensor
Here is a practical, step-by-step decision framework for selecting an ADCP sensor:
Step 1: Define Your Water Depth
This determines frequency. If your water depth is:
- < 25 m → 1200 kHz or 600 kHz ADCP sensor
- 25–75 m → 600 kHz ADCP sensor
- 75–160 m → 300 kHz ADCP sensor
- > 160 m → 75 kHz ADCP sensor
Step 2: Define Your Deployment Scenario
- Vessel-mounted survey? → Direct-reading ADCP sensor with bottom tracking
- Long-term mooring? → Self-contained ADCP sensor with internal battery and logger
- River cross-section? → Horizontal ADCP sensor (H-ADCP) with level sensor integration
- AUV/ROV navigation? → DVL (Doppler Velocity Log), a navigation-optimized ADCP sensor variant
Step 3: Decide Between Piston and Phased Array
- Piston-type (FA): Choose if you need maximum compatibility with existing deployment frames and software ecosystems.
- Phased-array (PA): Choose if you prioritize compact size, light weight, and reduced mechanical complexity — especially for portable systems or small platforms.
Step 4: Verify Data Output and Integration Compatibility
Ensure the ADCP sensor outputs data in formats your workflow can handle: binary raw data (for custom processing), ASCII/CSV (for quick inspection), or direct integration with software like WinRiver, QRev, or MATLAB toolboxes. If integrating with an INS (Inertial Navigation System), verify the DVL’s protocol compatibility.
Step 5: Compare Total Cost of Ownership
Beyond the purchase price, factor in: calibration costs, deployment hardware, cables, spares, software licenses, training, and expected service life. A lower upfront price tag can translate to higher lifetime costs if reliability or support is inadequate.
7. ADCP Sensor Applications Across Industries
ADCP sensors serve remarkably diverse industries. Here is a quick overview with links to deeper application pages:

Oceanography & Marine Research
- Ocean current mapping and circulation studies
- Coastal dynamics and sediment transport research
- Deep-sea mooring observations (IOC/WMO programs)
- More on oceanographic ADCP sensor applications →
Hydrology & Water Resources
- River discharge measurement (ISO 748 / USGS standards)
- Flood early-warning systems
- Irrigation canal monitoring and water resource management
- Read: ADCP Applications in River Discharge Measurement →
Offshore Energy
- Current profiling for offshore wind farm site assessment
- Deepwater oil & gas riser monitoring
- Cable and pipeline route surveys
- More on energy sector ADCP sensor applications →
Ports, Harbors & Navigation
- Real-time current nowcasting for vessel traffic management
- Dredging operations — monitoring suspended sediment plumes
- Navigation channel maintenance
Underwater Navigation (DVL)
- AUV and ROV precision navigation (INS/DVL integration)
- Subsea positioning where GNSS is unavailable
- Bottom-lock velocity reference for dynamic positioning
- Read: What Is a DVL? Difference Between DVL and ADCP →
8. Frequently Asked Questions About ADCP Sensors
What does “ADCP sensor” stand for?
ADCP stands for Acoustic Doppler Current Profiler. The “sensor” emphasizes the sensing/measurement function — the instrument is a precision hydroacoustic sensor that measures water velocity profiles using the Doppler effect.
How much does an ADCP sensor cost?
ADCP sensor prices vary widely by frequency, depth rating, and feature set. Entry-level river ADCP sensors start around $8,000–$15,000. Mid-range coastal profilers (300–600 kHz) typically range from $15,000–$30,000. Deep-ocean systems (75 kHz, full ocean depth) can exceed $40,000. Contact Oceantek for a quote tailored to your application.
What is the difference between an ADCP sensor and a DVL?
Both use the same underlying acoustic Doppler principle, but they are optimized differently. An ADCP sensor is designed to measure water velocity profiles (looking up or horizontally). A DVL (Doppler Velocity Log) is optimized for vehicle navigation — it looks down, prioritizes bottom-track velocity accuracy, and integrates with INS. For a complete explanation, see What Is a DVL? Difference Between DVL and ADCP.
Can one ADCP sensor measure both shallow and deep water?
No single frequency can optimally cover both extremes. A 600 kHz ADCP sensor delivers fine resolution in shallow water but cannot reach beyond ~75 m. A 75 kHz sensor can profile to 600+ m but lacks the resolution needed for shallow rivers. Multi-frequency ADCP sensor portfolios (like Oceantek’s 75/300/600 kHz range) are the practical solution for organizations working across diverse environments. Read: Multi-Frequency ADCP Portfolio Solves Every Profiling Challenge →
How long can a self-contained ADCP sensor deploy autonomously?
Deployment endurance depends on sampling strategy, battery capacity, and memory. Typical self-contained ADCP sensors can record continuously for weeks to several months on internal batteries. With external battery packs and burst-sampling strategies, deployments exceeding one year are feasible.
What maintenance does an ADCP sensor require?
Routine maintenance includes: cleaning transducer faces (biofouling degrades signal quality), checking O-rings and seals before each deployment, verifying compass calibration periodically, and factory recalibration every 1–2 years depending on usage intensity. Proper maintenance can extend an ADCP sensor’s service life to 10+ years.
How accurate are ADCP sensor measurements compared to mechanical current meters?
Under proper deployment conditions, a well-calibrated ADCP sensor achieves velocity accuracy of ±0.5% ±5 mm/s — comparable to or better than mechanical current meters — but with the added advantage of simultaneously profiling the entire water column rather than a single point. See our ADCP vs Traditional Current Meter comparison.
9. Summary: Choosing Your ADCP Sensor
An ADCP sensor is not a commodity item — it is a precision instrument where frequency, deployment mode, transducer architecture, and integration requirements must all align with your specific measurement objectives. The best ADCP sensor for a deep-ocean mooring is very different from the best one for a portable river survey kit.
Key takeaway checklist:
- Match frequency to water depth — 75 kHz for deep, 300 kHz for coastal, 600 kHz for rivers and shallows
- Match deployment type to logistics — direct-reading for real-time, self-contained for autonomy, river-type for horizontal monitoring
- Verify integration compatibility — data formats, protocols, mechanical mounting
- Evaluate transducer architecture — piston for compatibility, phased-array for compactness
- Consider total cost of ownership, not just purchase price — reliability, support, and calibration matter
Oceantek offers a complete range of ADCP sensors — from 75 kHz deep-ocean profilers to 600 kHz river ADCPs, from direct-reading survey instruments to self-contained autonomous profilers, and from traditional piston-type to compact phased-array designs. If you need help selecting the right ADCP sensor for your project, contact our engineering team for a technical consultation.
Need Help Selecting an ADCP Sensor?
Our engineering team can help you evaluate your measurement requirements, compare specifications, and select the optimal ADCP sensor configuration for your project.
- ✅ Free technical consultation
- ✅ Product specification sheets and datasheets available
- ✅ Comparison test reports vs. Teledyne RDI, SonTek, and Nortek
- ✅ OEM and custom configuration options available
Further Reading on ADCP Sensor Technology
- Acoustic Doppler Current Profiler Working Principle — In-Depth Technical Guide
- ADCP Frequency Selection: 75kHz vs 300kHz vs 600kHz — Complete Tutorial
- 600kHz vs 300kHz ADCP — How to Choose
- Key Parameters to Consider When Selecting an ADCP
- What Is a DVL? Difference Between DVL and ADCP
- ADCP vs Traditional Current Meter: Which Is Better?
- 2026 Global ADCP Industry White Paper: Market Dynamics, Technology Evolution & Competitive Landscape