Introduction
When an autonomous underwater vehicle (AUV) inspects a deep-sea pipeline without GPS, one sensor serves as its navigational lifeline: the Doppler Velocity Log (DVL). While those in oceanographic instrumentation may recognize its close cousin — the Acoustic Doppler Current Profiler (ADCP) — the distinction between the two often causes confusion among engineers and system integrators.
The core distinction can be framed simply: A DVL is an ADCP optimized for navigation, not measurement. As Nortek explains, “Our Doppler Velocity Logs, use the same principles as ADCPs, but instead measure the speed of a subsea vehicle relative to the seafloor.” Although some industry voices note that hardware platforms are gradually converging, the signal processing algorithms, accuracy requirements, and application contexts remain fundamentally different.
Drawing on our instrumentation experience at Oceantek, this article clarifies what a DVL is, how it differs from an ADCP across critical dimensions, and where our solutions fit in the market.
Key Takeaways:
- Different targets: DVLs lock onto the seafloor for navigation; ADCPs profile water-column particles for current measurement.
- Accuracy demands: I velocity accuracy specifications are roughly an order of magnitude tighter than typical ADCP specs.
- Mobility: DVLs are almost always mounted on moving vehicles (AUVs, ROVs); ADCPs are typically stationary or vessel-mounted.
- Convergence trend: Many modern DVLs now include ADCP current-profiling capability, offering a dual-use sensor package.
- Hardware quality: Oceantek DVLs use titanium housing as standard for corrosion resistance and long deployment life.
1. What Is a DVL? Definition, Working Principle & Core Applications
1.1 The Navigation Sensor That GNSS Cannot Replace
A Doppler Velocity Log (DVL) measures the velocity of an underwater vehicle relative to the seafloor or water column. SBG Systems defines it as “an acoustic sensor used to measure the velocity of an underwater vehicle relative to the seafloor or water column.” Sonardyne elaborates: “A Doppler Velocity Logger (DVL) is an instrument that measures the velocity (speed and direction) of an underwater vehicle relative to the sea bottom.”
How It Works:
The physics is elegant but the engineering is demanding. A DVL transmits acoustic pulses toward the seafloor through four downward-angled transducers in a Janus configuration.
- Pulses reflect off the seabed and return to the sensor.
- Because the vehicle is moving, the returning signal’s frequency shifts — the Doppler effect.
- “The Doppler shift is directly proportional to the relative velocity between the vehicle and sea bottom,” and comparing shifts across all four beams calculates the vehicle’s 3D speed and direction (surge, sway, heave), plus altitude above the seabed.
1.2 Why DVL Matters: Closing the INS Drift Loop
The fundamental challenge of any inertial navigation system (INS) is drift. An INS integrates acceleration to estimate velocity and position, so small errors accumulate relentlessly — potentially hundreds of meters per hour.
A DVL provides the external velocity reference that corrects this drift. This fusion, known as an INS/DVL integrated navigation system, is the gold standard for subsea positioning.
“The Doppler velocity logger (DVL) is based on the acoustic Doppler principle and can measure the absolute velocity of its carrier relative to the seabed … and the error will not accumulate over time.”
— 2025 IEEE Paper on AUV Navigation
Without a DVL, long-duration AUV missions and deep-water ROV operations would be far less precise.
1.3 Core Applications


- AUV navigation: Survey-class AUVs rely on DVL-aided INS for accurate track-line following and geo-referenced data.
- ROV positioning: Work-class and inspection-class ROVs use DVLs to hover, station-keep, and maneuver precisely near subsea infrastructure.
- Manned submersibles: Extend the time between GPS fixes.
- USV dynamic positioning: Uncrewed surface vessels use DVLs as backup navigation if GNSS is lost or jammed.
2. DVL vs ADCP: Working Scenario Difference
2.1 “Looking Down” vs “Looking Up”
The most fundamental operational difference lies in what each instrument considers its primary target.
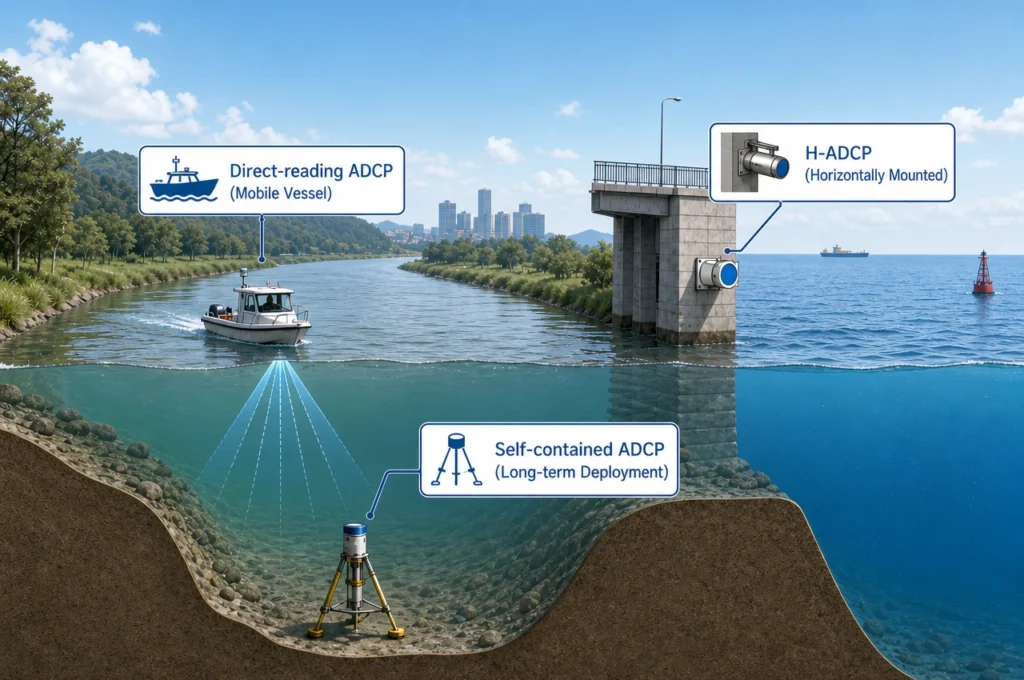
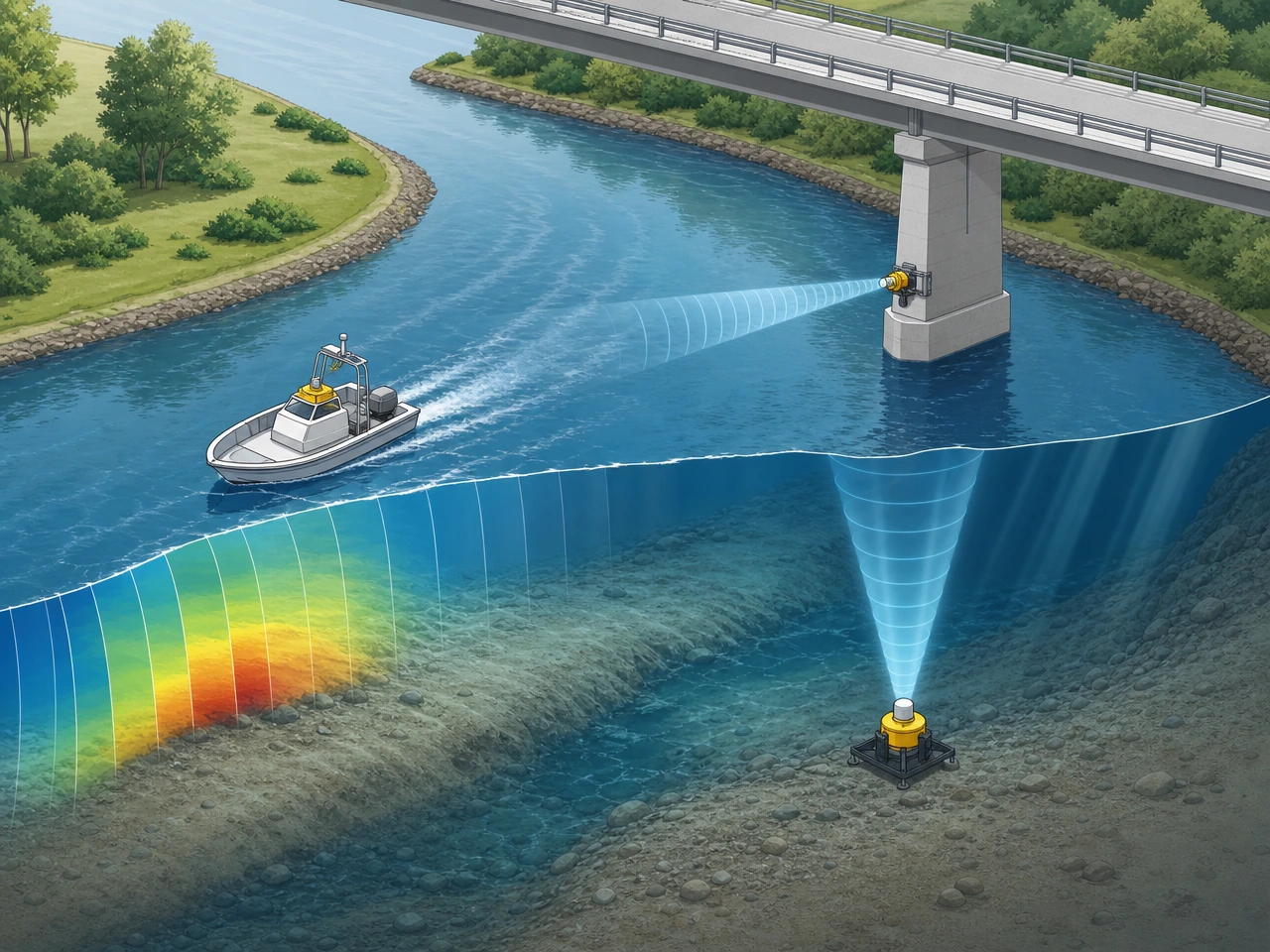
- ADCP: Looks upward or horizontally into the water column, listening for echoes from passively drifting particles (sediment, plankton). It builds a velocity profile of the entire water column.
- DVL: Looks downward, sending sound toward the seabed and listening specifically for the strong reflection off the seafloor. The signal processing chain is optimized for bottom tracking, not water profiling.
“DVL cannot be used as an ADCP! The algorithm in DVL is specifically designed for acoustic waves reflected from the seafloor (bottom tracking), while the ADCP algorithm mainly relies on reflections from particles at different depths in the water (water tracking).”
— Manufacturer FAQ
- ADCP is a measurement instrument: “What is the water doing?”
- DVL is a navigation instrument: “What is the platform doing?”
2.2 Operational Deployment: Fixed vs Mobile
- ADCPs are typically stationary — bottom-mounted, moored, or fixed to a structure. Platform motion is either zero or well-characterized; the goal is water velocity.
- DVLs are almost always mounted on a moving platform — the underside of an AUV, ROV, or submersible. The sensor is in motion, and its primary job is to measure the vehicle’s own velocity relative to the stationary seabed.
2.3 Bottom Lock: The Make-or-Break Condition
- For a DVL, “bottom lock” is everything. Without reliable seabed reflection, the DVL must fall back to water-track mode, which introduces error because water masses themselves may be moving.
- For an ADCP, bottom tracking is auxiliary. It can measure boat speed during river discharge, but an ADCP can function perfectly well without bottom lock, profiling currents entirely from water-column returns.
2.4 Data Output Priorities
| Output | ADCP (Measurement) | DVL (Navigation) |
|---|---|---|
| Primary output | Current speed/direction at multiple depth cells (bins) | 3-axis velocity vector (surge, sway, heave) + altitude |
| Data rate | Slower (1–4 Hz typical; averaged over minutes) | Fast (4–16 Hz or higher) to feed control loops |
| Water profile | Core function | Optional on some models |
3. Technical Parameter Differences
3.1 Frequency Selection: Altitude vs Resolution
Both instruments face the range-vs-resolution trade-off, but apply it differently.
DVLs are offered in frequency bands matched to vehicle operating depth:
- 1 MHz: Bottom track 0.1–75 m (shallow AUVs, small ROVs)
- 600 kHz: Bottom track to ~120 m (micro-ROVs)
- 500 kHz: Bottom track to 200 m (medium-depth operations)
- 300–400 kHz: Bottom track to 220–375 m (deep-water survey)
- 150 kHz: Bottom track to 500 m, extendable to 800 m (large AUVs, deep platforms)
ADCPs cover a broader range (38 kHz to 3 MHz) because their profiling range needs span from shallow streams to full-ocean-depth currents. The 75 kHz phased-array ADCP profiles to 550–650 m — range that would be overkill for most DVL applications.
3.2 Velocity Accuracy: The Precision Imperative
DVL accuracy specifications are tighter by roughly an order of magnitude because navigation demands much higher precision than current profiling.
| Sensor Class | Typical Accuracy | Example |
|---|---|---|
| Survey-grade DVL | ±0.1% ± 0.1 cm/s | Nortek DVL (export-controlled) |
| Precision DVL | ±0.12% ± 0.1 cm/s | Sonardyne Syrinx |
| Mid-range DVL | ±0.6% to ±1.15% | Teledyne Pioneer, Wayfinder |
| High-end ADCP | ±0.25% to ±1.0% | RiverPro, Workhorse, etc. |
*At a vehicle speed of 2 m/s, ±0.1% translates to 2 mm/s error. The same speed on a ±0.5% ADCP would yield a 1 cm/s error — five times larger.*
3.3 Profiling Capability: Built-in or Absent
Many modern DVLs retain ADCP-like water profiling capability, offering a single-instrument solution for navigation + environmental sensing.
- Combined units: Nortek’s DVLs include current profile functionality; Sonardyne’s Syrinx is marketed as an “Integrated DVL & ADCP” with profiling ranges of 80–120 m.
- Pure navigation units: Some compact DVLs forego water profiling entirely to minimize size and power. Teledyne’s Wayfinder (10×10×7 cm) has no water profiling range.
Procurement tip: If your mission needs current data alongside navigation, a combined DVL/ADCP eliminates the need for a second instrument and its integration burden.
3.4 Key Parameter Comparison Table
| Parameter | DVL (Navigation) | ADCP (Measurement) |
|---|---|---|
| Primary target | Seafloor reflection (bottom lock) | Water-column particle scattering |
| Key output | Vehicle velocity (3-axis) + altitude | Water velocity profile (multiple depth bins) |
| Mounting | Moving platform (AUV, ROV, sub) | Fixed or vessel-mounted |
| Typical frequency range | 150 kHz – 1 MHz | 38 kHz – 3000 kHz |
| Velocity accuracy (survey-grade) | ±0.1% ± 0.1 cm/s | ±0.25% to ±1.0% |
| Data output rate | 4–16 Hz typical | 1–4 Hz typical |
| Water profiling | Optional on some models | Core function |
| Critical condition | Bottom lock required | Bottom lock optional |
4. DVL Usage in ROV and AUV Navigation
4.1 INS/DVL: The Subsea Navigation Backbone
INS and DVL compensate for each other’s weaknesses:
- INS: High-frequency, low-latency motion data, but drifts over time.
- DVL: Low-frequency, drift-free velocity data, but with inherent measurement noise.
Fused through a Kalman filter, the result is a position solution that is both responsive and stable over extended missions.
This approach is so standard that it’s a central research topic in underwater robotics. Recent IEEE papers on “AQUA-SLAM” (2024) and “Bayesian-Inversion-Based Multisensor Fusion” (2025) treat DVL data as a core input for graph optimization and sensor fusion algorithms. The market reinforces this: Teledyne’s Compact Navigator combines phased-array DVL with INS in a single flush-mountable package, and Nortek’s Nucleus 1000 offers an all-in-one navigation sensor for small vehicles.
4.2 Real-World Integration Examples
- Deep-water work-class ROVs: Operate at depths where GPS and acoustic positioning have limited coverage. They rely on high-power DVLs (e.g., Teledyne Pioneer, 500–800 m bottom track) to maintain navigation near seabed infrastructure.
- Survey-class AUVs: Need continuous, drift-free navigation for geo-referenced data. Use mid-frequency DVLs (300–600 kHz). A growing trend is combined DVL/ADCP instruments so vehicles can simultaneously navigate and collect current data.
- Small inspection ROVs: Bridge, dam, and aquaculture inspections benefit from compact, low-power DVLs. Teledyne’s Wayfinder (3W average, palm-sized) provides altitude and station-keeping without weight penalty.
4.3 Operational Considerations
When integrating a DVL, watch for these practical factors beyond datasheets:
- Mounting geometry: Must be rigid, with clear line of sight to seabed — even one blocked beam degrades velocity data.
- Noise environment: Thrusters and propellers generate acoustic noise; some DVLs offer upgrades for noisy environments (e.g., Teledyne Pioneer’s XRT).
- Altitude envelope: Vehicle must stay within bottom-track range; transitioning to water-track or inertial-only navigation is a challenging handoff.
- Warm-up/calibration: Some DVLs need gyroscope calibration; accuracy can be temperature-affected.
5. Oceantek DVL Product Positioning
5.1 Where Oceantek Fits in the DVL Ecosystem
The global DVL market is well served by established western players — Teledyne RDI (5,000+ DVLs fielded), Nortek, and Sonardyne — covering the full spectrum from micro-ROV to deep-water phased-array. At the same time, Chinese-developed Doppler technology has advanced steadily, with institutions like the Chinese Academy of Sciences Institute of Acoustics producing full-ocean-depth DVLs deployed even in polar regions.



Oceantek positions itself as a developer of both ADCP and DVL products, leveraging shared acoustic Doppler hardware platforms for hydrology and subsea navigation. The company’s DVLs are built on the same transducer technology and signal processing expertise powering its ADCP lineup.
5.2 Oceantek’s DVL Technology Approach
Four design principles set Oceantek DVLs apart:
- Standard titanium alloy housing: Eliminates corrosion-related upgrade costs and ensures durability in marine environments — a critical advantage for long-term autonomous missions.
- Field-validated performance: Recent sea trials in the Zhoushan archipelago tested the 75 kHz, 600 kHz, and 300 kHz instruments across installation, underwater measurement, and data verification. As the test team noted, this answers the critical question: “Can the equipment work stably, reliably, and repeatably in real-world environments?”
- Protocol compatibility: Supports industry-standard communication protocols for straightforward integration with third-party INS solutions.
5.3 The Oceantek Value Proposition
For integrators, vehicle manufacturers, and research institutions:
- Competitive pricing — enabled by in-house transducer development and manufacturing.
- Cross-platform expertise — ADCP engineering directly informs DVL quality.
- Direct engineering support — rapid response for integration and troubleshooting.
5.4 Selection Framework by Vehicle Class
| Vehicle Class | Recommended DVL Type | Key Consideration |
|---|---|---|
| Micro-ROV / Small AUV | Compact high-frequency DVL | Minimal SWaP (Size, Weight, Power); short-range operation |
| Medium AUV / Inspection ROV | Mid-frequency DVL | Balance of range and accuracy; potential dual-use profiling |
For specific model selection, frequency recommendations, or integration support, contact the Oceantek team: sales@oceanadcp.com or request a quick quote
Conclusion
The ADCP and DVL share a common acoustic Doppler heritage but have evolved into distinctly specialized instruments. The ADCP profiles water currents for scientific measurement; the DVL tracks vehicle motion for precision navigation.
Key distinctions to remember:
- DVLs require bottom lock and output 3-axis vehicle velocity with survey-grade accuracy.
- ADCPs measure water velocity profiles, operate without bottom lock, and prioritize spatial resolution.
- Convergence means many modern DVLs can also profile currents, offering a single-instrument navigation + sensing solution.
- Oceantek bridges both worlds with a cohesive Doppler product line featuring standard titanium construction, field-validated performance, and competitive pricing.
Matching the right instrument to the right task — whether profiling a tidal channel or navigating a deep-water AUV — is the first step toward reliable data and successful missions.